Der HW-040-Sensor sieht aus wie ein Drehwiderstand. Er kann aber endlos rotiert werden - ein Drehwiderstand kann immer nur vom Minimal- zum Maximalwert gedreht werden.
Der Rotationsencoder hat 5 Kontakte. Schließe vier davon wie folgt an den Arduino an:
Über den CLK und den DT-Pin werden die Rotationsdaten ausgelesen.
Erstelle einen neuen Sketch und speichere ihn unter dem Namen Rotation.
Kopiere folgende Codezeilen an den Beginn deines Sketeches:
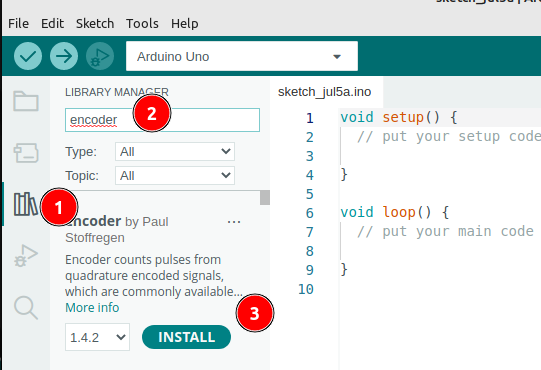
#include <Encoder.h>
int CLK = 6;
int DT = 5;
long alt = 0; // alter Messwert
Encoder myEncoder(DT,CLK);
In der setup()-Methode startest du nur die serielle Datenübertragung-
void setup()
{
Serial.begin(9600);
}
void loop()
{
long neu = myEncoder.read();
if (neu != alt) {
alt = neu;
Serial.println(neu);
}
}
An dieser Stelle wird ein neuer Messwert eingelesen.
Wenn der neue Messwert ein anderer als der alte ist, wird der alte Wert aktualisiert und der neue ausgegeben.